




 Qzone
Qzone
 微博
微博
 微信
微信


至少早在1967年,理查德·布劳提根(Richard Brautigan)发表了一首诗《慈爱的机器照看一切》(All Watched Over by Machines Loving Grace)时,就有兴趣探索尖端科技与自然世界之间不太可能的交汇点。
在最新的例子中,来自意大利Istituto Italiano di Tecnologia(IIT)的工程师开发出了他们所宣称的世界上第一款能够像真实植物一样攀爬和卷曲的卷须式软体机器人。有朝一日,这种方法可能会被用于创造未来的可穿戴设备,使其能够根据自身情况改变形状。
“它基于模仿植物利用细胞、组织和器官内水分运输的自然机制。”IIT微生物机器人中心主任Barbara Mazzolai告诉Digital Trends,“水力学原理被称为渗透,并且基于细胞质中的小颗粒的存在,即细胞内植物液体。植物利用这一原理调整其刚度并实现宏观运动。我们开发了一种类似卷须的软机器人,[能够]到达并固定在外部支撑上。软机器人由柔性PET管制成,包含带有带电离子的液体。通过使用1.3伏电池,这些颗粒被吸引并固定在卷须底部的柔性电极表面上。它们的运动带动机器人的液体运动,[结果也是机器人的运动]。”
通过断开电线与电池的连接,可以逆转机器人卷须的运动。该研究代表了由欧盟委员会资助的名为“GrowBot”新项目的第一阶段。它致力于开发一种能够适应周围环境的机器人,包括识别它附着的表面。
“软机器人可能允许[机器人]与物体或生物安全地互动。”Mazzolai继续道,“可能的应用范围从可穿戴技术到用于探索的灵活机器人手臂的开发。”虽然她承认“模仿植物移动能力的挑战才刚刚开始”,但这个概念验证演示仍然是一个令人兴奋的步骤正在进行中。
这篇描述机器人卷须项目的论文最近发表在Nature Communications杂志上。
软体机器人是一种新型柔软机器人,能够适应各种非结构化环境,与人类的交互也更安全。机器人本体利用柔软材料制作,一般认为是杨氏模量低于人类肌肉的材料;区别于传统机器人电机驱动,软体机器人的驱动方式主要取决于所使用的智能材料;一般有介电弹性体(DE)、离子聚合物金属复合材料(IPMC)、形状记忆合金(SMA)、形状记忆聚合物(SMP)等等,从响应的物理量暂时分为如下几类:电场、压力、磁场、化学反应、光、温度。科学家依此设计了各种各样的软体机器人,大多数软体机器人的设计是模仿自然界各种生物,如蚯蚓、章鱼、水母等。
近年来,随着工业4.0及中国制造2025等概念的持续推进,中国工业机器人产业得到了较好的发展。据前瞻产业研究院发布的《中国工业机器人行业产销需求预测与转型升级分析报告》统计数据显示,截止至2017年中国工业机器人销量达13.8万台,同比增长58.6%,增速同比全球工业机器人销量增速31%,高出27.6个百分点。而市场销售额突破50亿美元,同比增长30.2%。
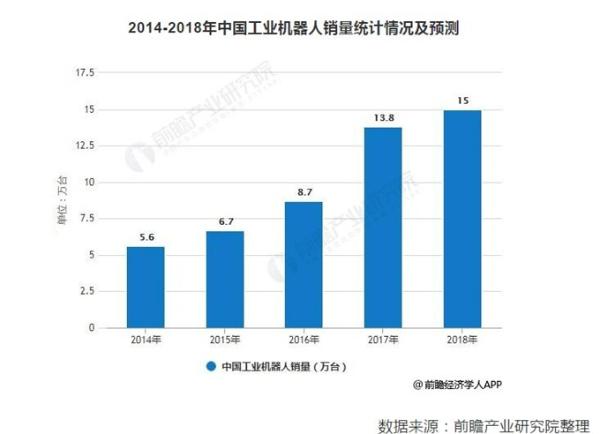
随着中国智能制造政策推进,制造行业智能化改造升级加快,工业机器人需求量将日益增长。预计2018年中国工业机器人销量将超15万台,市场销售额将达62.3亿美元,并预测到2020年,中国工业机器人销量额将进一步扩大到93.5亿美元。
本文来源前瞻网,转载请注明来源。本文内容仅代表作者个人观点,本站只提供参考并不构成任何投资及应用建议。(若存在内容、版权或其它问题,请联系:service@qianzhan.com)







安兔兔2022-05-25 20:4405-25 20:44

娱乐中国2022-05-25 20:2805-25 20:28
电影界2022-05-25 20:1905-25 20:19

电影界2022-05-25 20:1505-25 20:15
电影界2022-05-25 20:1505-25 20:15

新娱在线2022-05-25 20:1005-25 20:10

南方娱乐网2022-05-25 20:0605-25 20:06

电影界2022-05-25 19:5705-25 19:57






 点击下方菜单栏 “
点击下方菜单栏 “  ” 选择 “分享”, 把好文章分享出去!
” 选择 “分享”, 把好文章分享出去!

 为推荐给更多人
分享写下你的想法>
为推荐给更多人
分享写下你的想法>












 京公网安备
京公网安备 网上有害信息
网上有害信息 12321垃圾信息
12321垃圾信息 北京市互联网举报
北京市互联网举报