




 Qzone
Qzone
 微博
微博
 微信
微信

机器人如今已经渗透各行各业,在自动化装配等方面更是频频大展身手。但在具体的一些领域,比如生物医学领域,机器人可能更微型和柔软灵活,干的活也更“精细”。
为了方便机器人对那些只有几十微米或几百微米长的微结构进行加工,科学家们开发出了更可行的解决方案。
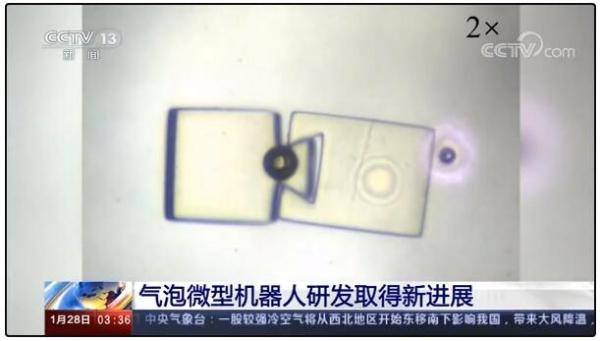
(图源:视频截图)
近日,中国科学院沈阳自动化研究所微纳米课题组在这一领域取得了新的突破。根据他们的设想,可以在已开展的气泡微型机器人对微结构二维及三维操作(包括二维移动、旋转和三维翻转、滚动等)基础上,研制出能够将多个独立结构装配成一体化结构并控制其运动的气泡微型机器人。
通过巧妙设计的微结构,具有卡扣连接结构。这样一来,气泡微型机器人可以将多个独立微结构抬起、翻转并装配成不会散开的一体化结构。
据胶黏中科院沈阳自动化研究所研究员焦念东介绍,这个过程主要是利用一束激光照射液体中吸热基底表面,通过光热效应,可以产生直径几十微米的微气泡。通过调整激光光斑照射位置,可以控制气泡随着光斑在基底表面同步运动,进而可利用这些气泡驱动微型机器人执行微纳操作及装配。
气泡机器人也可作为驱动器驱动这些结构运动,包括蛇形结构弯曲、齿轮旋转、小车运动等。
可以看到,这样的一个研究显然在微型机器人应用领域是具有巨大潜力的。近日,他们的研究成果也已经发表在ACS Applied Materials & Interfaces上,并被《美国化学学会》选为亮点工作。
本文来源前瞻网,转载请注明来源。本文内容仅代表作者个人观点,本站只提供参考并不构成任何投资及应用建议。(若存在内容、版权或其它问题,请联系:service@qianzhan.com)










泡泡网2022-05-24 19:4805-24 19:48

南方娱乐网2022-05-24 19:2405-24 19:24

猎云网2022-05-24 17:5705-24 17:57

TOM2022-05-24 17:5705-24 17:57

TOM2022-05-24 17:5505-24 17:55

TOM2022-05-24 17:5505-24 17:55






 点击下方菜单栏 “
点击下方菜单栏 “  ” 选择 “分享”, 把好文章分享出去!
” 选择 “分享”, 把好文章分享出去!

 为推荐给更多人
分享写下你的想法>
为推荐给更多人
分享写下你的想法>


















 京公网安备
京公网安备 网上有害信息
网上有害信息 12321垃圾信息
12321垃圾信息 北京市互联网举报
北京市互联网举报